
2025年04月的文章 第5页
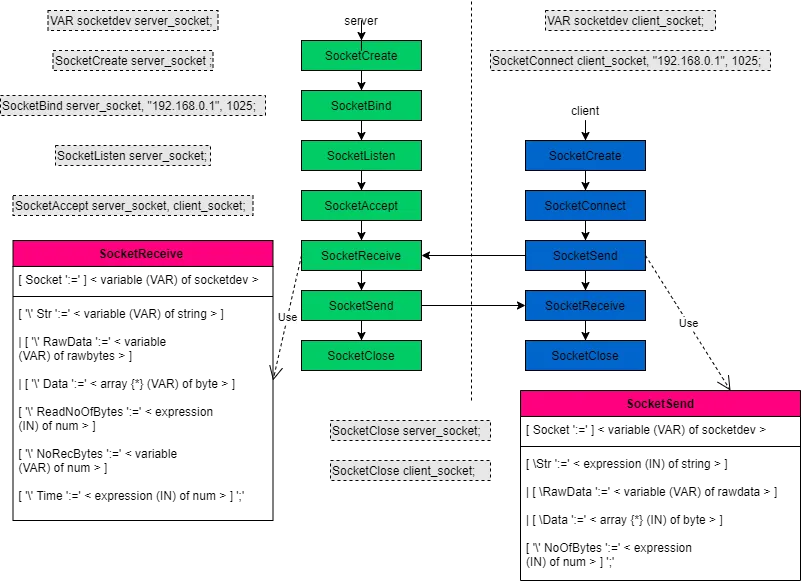
ABB机器人socket通讯的3种方式及解析详解
详解 ABB Socket通讯3种方式:用 RAPID 处理 String(字符串), Byte(字节数组), RawData(二进制)。含代码示例,重点解析 RawData 收发(包头/分包)机制。
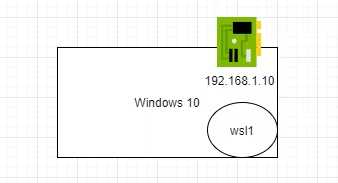
wsl安装ROS引导ABB机器人运动
指南:使用 WSL1 (网络配置比WSL2更简单) 安装 ROS,成功通过 127.0.0.1 连接 ABB RobotStudio 并引导机器人运动。解决在 Windows 上运行 ROS 与 ABB 仿真的通讯难题。

ROS引导ABB机器人运动仿真测试
教程:配置 VMware (仅主机模式) + Ubuntu 18.04 + ROS,实现对 ABB RobotStudio 仿真机器人的运动控制。含网络设置、abb_driver 及 Catkin 工作区配置详解。
ROS机器人操作系统介绍及wsl2安装ROS
介绍 ROS 机器人操作系统及其起源,并提供 Windows 下 WSL2 (Ubuntu 18.04) 安装 ROS Melodic 的详细步骤,含 MobaXterm 图形界面配置及测试。
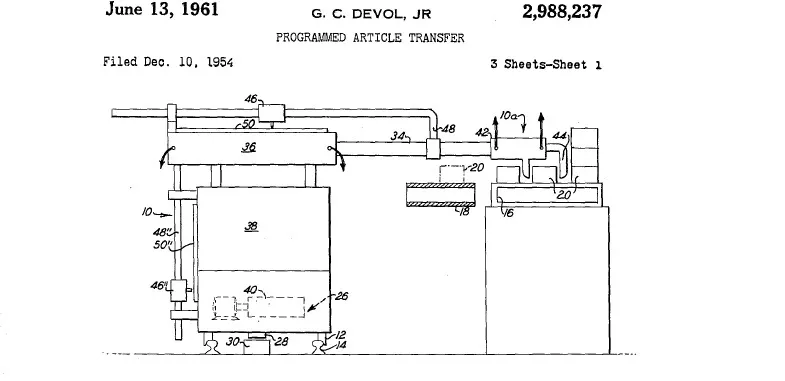
工业机器人发展史,上世纪70年代至今
回顾工业机器人发展史:从 Unimate 液压臂诞生,PUMA 电动臂突破,到 ABB/KUKA/FANUC 等欧日品牌崛起,了解关键技术、公司与市场变迁。