

 zuodianshier
zuodianshier
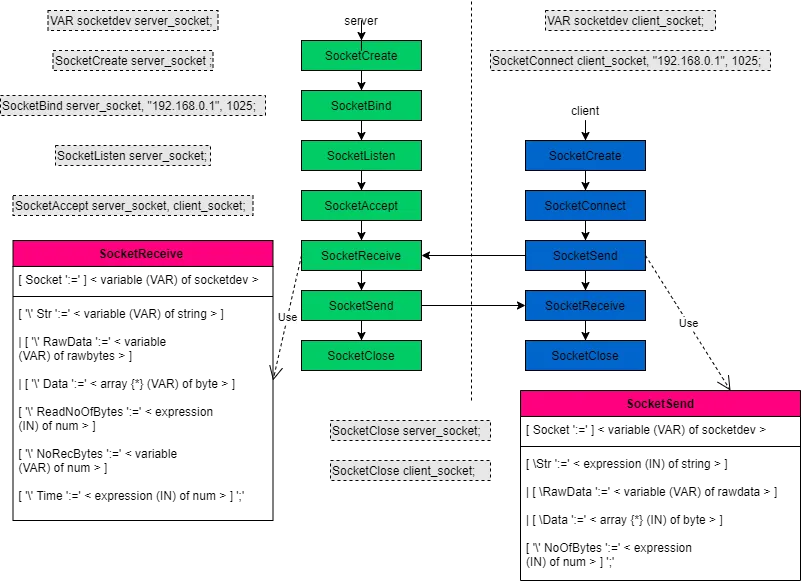
ABB机器人socket通讯的3种方式及解析详解
详解 ABB Socket通讯3种方式:用 RAPID 处理 String(字符串), Byte(字节数组), RawData(二进制)。含代码示例,重点解析 RawData 收发(包头/分包)机制。

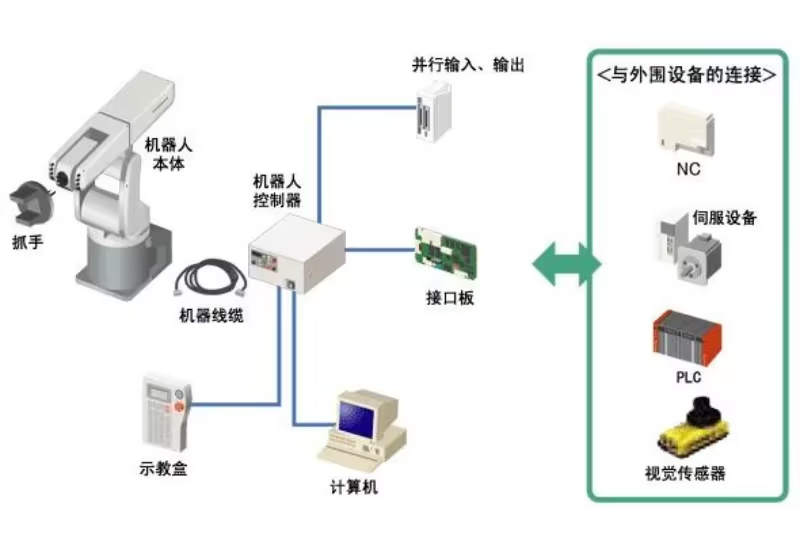
工业机器人系统介绍及ABB、KUKA、FANUC选型比较
解析工业机器人系统架构,详细对比 ABB、KUKA、FANUC 在控制器 (IRC5/KR C4/R-30iA)、系统 (VxWorks)、编程 (Rapid/KRL/KAREL)、开放性及优缺点,为机器人选型提供参考。

ABB机器人irb1200及irb1200Hygienic(卫生型)产品介绍及三维模型下载
探索 ABB IRB 1200,一款紧凑型机器人,提供 5kg/0.9m 和 7kg/0.7m 两种规格。具有食品级、铸造、洁净室等多种选项,适配广泛应用。可选 OmniCore 或 IRC5 控制器。下载产品文档和三维模型。

ROS引导ABB机器人运动仿真测试
教程:配置 VMware (仅主机模式) + Ubuntu 18.04 + ROS,实现对 ABB RobotStudio 仿真机器人的运动控制。含网络设置、abb_driver 及 Catkin 工作区配置详解。
ROS机器人操作系统介绍及wsl2安装ROS
介绍 ROS 机器人操作系统及其起源,并提供 Windows 下 WSL2 (Ubuntu 18.04) 安装 ROS Melodic 的详细步骤,含 MobaXterm 图形界面配置及测试。

ABB通讯-profinet传输正负整数及浮点数
修正版 ABB RAPID 代码:实现 Profinet 传输浮点数和正负整数 (Float/DINT/INT/SINT)。解决机器人发送32位数据错误,提供字节拆分发送 senddata 示例。
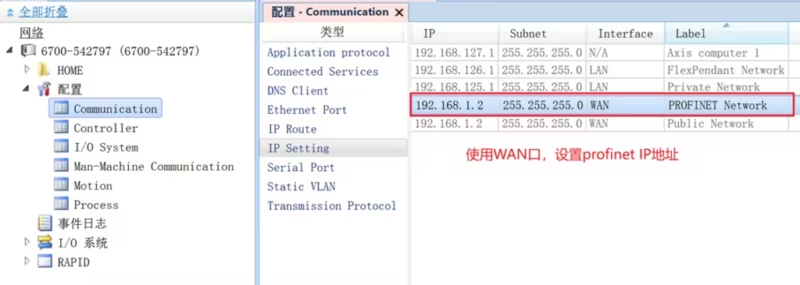
ABB机器人nfs、socket、robotstudio远程及profinet共用X6-WAN口
配置指南:使 ABB 机器人 X6 WAN 口同时支持 Profinet 和 NFS/Socket/RobotStudio 连接。详解公共网络设置、IP规则、所需选项 (616-1, 614-1) 及常见问题。