
不成熟技术共3篇
工业4.0领域突破性技术实践,深度拆解NVIDIA Omniverse数字孪生工厂构建流程、AIoT设备边缘计算部署方案及特斯拉式无人工厂改造路径。提供工业机器人动态轨迹补偿算法源码、OPC UA信息模型构建指南与EtherCAT分布式时钟同步案例。
排序
ROS机器人操作系统介绍及wsl2安装ROS
介绍 ROS 机器人操作系统及其起源,并提供 Windows 下 WSL2 (Ubuntu 18.04) 安装 ROS Melodic 的详细步骤,含 MobaXterm 图形界面配置及测试。

ROS引导ABB机器人运动仿真测试
教程:配置 VMware (仅主机模式) + Ubuntu 18.04 + ROS,实现对 ABB RobotStudio 仿真机器人的运动控制。含网络设置、abb_driver 及 Catkin 工作区配置详解。
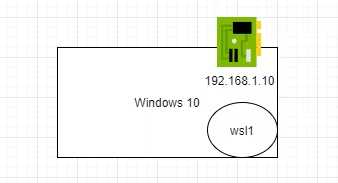
wsl安装ROS引导ABB机器人运动
指南:使用 WSL1 (网络配置比WSL2更简单) 安装 ROS,成功通过 127.0.0.1 连接 ABB RobotStudio 并引导机器人运动。解决在 Windows 上运行 ROS 与 ABB 仿真的通讯难题。







一位 WordPress 评论者2025年4月16日0
您好,这是一条评论。若需要审核、编辑或删除评论,请访问仪表盘的评论界面。评论者头像来自 Gravatar。